Please wait, while our marmots are preparing the hot chocolate…
 ## Disclaimer {infobox image-full top-right darkened /black-bg /no-status}
- Some notations are atypical. // due to the mix of domains
- I will, almost surely, skip sections.
- Don't hesitate to ask questions lives.
## TITLE {#plan plan overview /with-ujm}
- Unsupervised Representation Learning {intro}
- Notations and problem formulation {setup}
- Probabilistic (graphical) models {probmod}
- Auto-encoders {autoenc}
- Generative Adversarial Networks {gan}
- adversarial examples and training
- GANs
- Focus on … {focuses}
- optimization {focus optim}
- space and time convolutions {focus conv}
- *depth {focus depth}*, *breadth/width {focus width}*
- semantics {focus semantics}
- sequential/temporal aspects {focus temporal}
- recent GAN[s](#recentgans) {focus recentgans}
- Wrap up {conclusion}
# @copy:#plan: %+class:highlight: .intro
## Representation Learning at Hubert Curien // supervised at Data Intelligence, mostly equivalent to learning
@svg: repr/representation-di.svg 800 500
- @anim: #tasks |#data-low |#data-mid |#data-high |#methods-title |#methods-mining |#methods-metric |#methods-local |#methods-grammar |#methods-deep
## Unsupervised (Representation) Learning
- No labels available
- Learning intermediate features or representations
- Task agnostic
- Related to (data) density estimation
- Related to compression
## Example: motif mining in videos / temporal data
@svg: motif-mining/motif-mining-task.svg 750 400
- @anim: #layer1 + -#init | #layer2 | #layer3 | #layer7 | #layer4 | #layer6 | #layer5
- Key points: structure? compression? density estimation? {slide} // st {hard, related, that I know} well-enough
- {notes}
- n. relation to compression, ...
- n. notion of need to have a some structure/assumptions/priors
- n. structured data probability density estimation
- n. something that is {hard, related, that I know} well-enough
# @copy:#plan: %+class:highlight: .setup
# Notations and problem formulation {#setup}
## Notations and Problem Formulation
- Notations
- $x$ : data (observations)
- $y$ : value to predict (for supervised cases)
- $z$ : unknown, unobserved latent information
- $\theta$ (or $W$) : model parameters // will come back on the differences z vs θ
- Unsupervised learning
- only $x$ is given
- need to find the parameters ($\theta$, $W$)
- may want to further infer the latent variables ($z$)
# @copy:#plan: %+class:highlight: .probmod
# Probabilistic (graphical) models {#probmod}
## Generative Model, Parameters, Latent Vars…
- Observations / Data
## Disclaimer {infobox image-full top-right darkened /black-bg /no-status}
- Some notations are atypical. // due to the mix of domains
- I will, almost surely, skip sections.
- Don't hesitate to ask questions lives.
## TITLE {#plan plan overview /with-ujm}
- Unsupervised Representation Learning {intro}
- Notations and problem formulation {setup}
- Probabilistic (graphical) models {probmod}
- Auto-encoders {autoenc}
- Generative Adversarial Networks {gan}
- adversarial examples and training
- GANs
- Focus on … {focuses}
- optimization {focus optim}
- space and time convolutions {focus conv}
- *depth {focus depth}*, *breadth/width {focus width}*
- semantics {focus semantics}
- sequential/temporal aspects {focus temporal}
- recent GAN[s](#recentgans) {focus recentgans}
- Wrap up {conclusion}
# @copy:#plan: %+class:highlight: .intro
## Representation Learning at Hubert Curien // supervised at Data Intelligence, mostly equivalent to learning
@svg: repr/representation-di.svg 800 500
- @anim: #tasks |#data-low |#data-mid |#data-high |#methods-title |#methods-mining |#methods-metric |#methods-local |#methods-grammar |#methods-deep
## Unsupervised (Representation) Learning
- No labels available
- Learning intermediate features or representations
- Task agnostic
- Related to (data) density estimation
- Related to compression
## Example: motif mining in videos / temporal data
@svg: motif-mining/motif-mining-task.svg 750 400
- @anim: #layer1 + -#init | #layer2 | #layer3 | #layer7 | #layer4 | #layer6 | #layer5
- Key points: structure? compression? density estimation? {slide} // st {hard, related, that I know} well-enough
- {notes}
- n. relation to compression, ...
- n. notion of need to have a some structure/assumptions/priors
- n. structured data probability density estimation
- n. something that is {hard, related, that I know} well-enough
# @copy:#plan: %+class:highlight: .setup
# Notations and problem formulation {#setup}
## Notations and Problem Formulation
- Notations
- $x$ : data (observations)
- $y$ : value to predict (for supervised cases)
- $z$ : unknown, unobserved latent information
- $\theta$ (or $W$) : model parameters // will come back on the differences z vs θ
- Unsupervised learning
- only $x$ is given
- need to find the parameters ($\theta$, $W$)
- may want to further infer the latent variables ($z$)
# @copy:#plan: %+class:highlight: .probmod
# Probabilistic (graphical) models {#probmod}
## Generative Model, Parameters, Latent Vars…
- Observations / Data
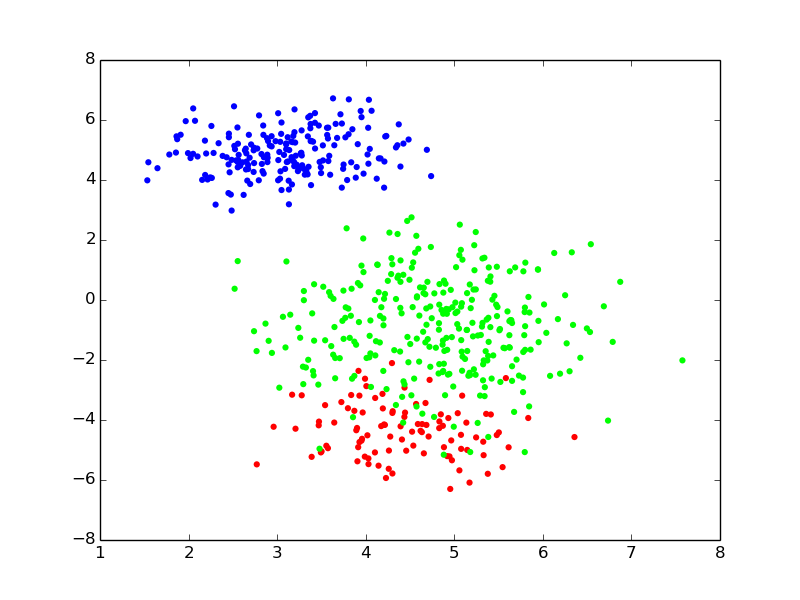
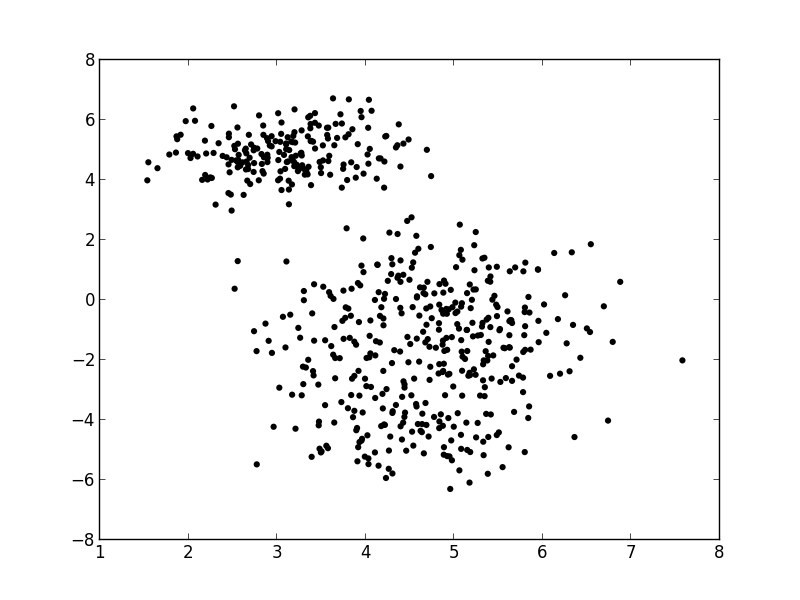 - Supposition, we have a mixture of 3 gaussians {slide}
- Challenge {slide}
- gaussians have unknown *parameters*
- which point belongs to which component is *not observable*
- @anim: .first
## Probabilistic Modeling: principle {libyli}
- Adopting a generative approach
- think about how the world generated the data
- describe it in a “generative model”
- Formalize your assumptions about the observations (data)
- choose/design a model
- a model formulates how *some unknown variables* that are “responsible” for the *observations* (data)
- set some priors on the unknown variables
- Naming convention: different types of unknowns
- parameters: unknown global parameters of the model
- latent variables: unknown observation-specific variables // usually unknown
- With a mixture of Gaussians
- parameters: mean and covariances (and weight) of all Gaussians
- latent variables: which Gaussian each data points comes from
## Probabilistic Model Learning {libyli}
- The model is generative
- describes how the data ($x$) gets generated
- “forward model”
- the probability of the observations: $p(x | \theta)$
- Finding the unknowns (parameters, latent var.) is challenging
- reversing the generative process
- finding (or maximizing) $p(\theta | x)$ or $p(\theta, z | x)$ or $p(z | x, \theta)$
- high dimensional parameter/latent spaces
- highly non-convex functions
## M1 − PCA: intuition
@svg: media/wikipedia-pca.svg 800 500
- @anim: #patch_3 | #patch_4
## M1: PCA
@svg: media/wikipedia-pca.svg 200 200 {model}
@svg: graphs/theta-x.svg 100 250 {model m11 clearright}
@svg: graphs/x-f-theta.svg 100 250 {model minv}
// @svg: media/factor.svg 40 300 {model m12}
- Principle Component Analysis (eigen-*)
- dimensionality reduction
- capture the maximum amount of data variance
- PCA probabilistic view {libyli}
- observations come from a single low-dimensional gaussian distribution
- ... and are transformed with a linear transformation (rotation + scale),
- ... and have added noise noisy
- @anim: .m11
- Over-generic graphical representation {slide}
- $\theta$ is linear transformation
- data points $x$ depend on $\theta$
- no *explicit* latent variables *{ico-pencil}*
- @anim: .minv
- Inference problem: $f$ {slide}
- dedicated algorithms
- Supposition, we have a mixture of 3 gaussians {slide}
- Challenge {slide}
- gaussians have unknown *parameters*
- which point belongs to which component is *not observable*
- @anim: .first
## Probabilistic Modeling: principle {libyli}
- Adopting a generative approach
- think about how the world generated the data
- describe it in a “generative model”
- Formalize your assumptions about the observations (data)
- choose/design a model
- a model formulates how *some unknown variables* that are “responsible” for the *observations* (data)
- set some priors on the unknown variables
- Naming convention: different types of unknowns
- parameters: unknown global parameters of the model
- latent variables: unknown observation-specific variables // usually unknown
- With a mixture of Gaussians
- parameters: mean and covariances (and weight) of all Gaussians
- latent variables: which Gaussian each data points comes from
## Probabilistic Model Learning {libyli}
- The model is generative
- describes how the data ($x$) gets generated
- “forward model”
- the probability of the observations: $p(x | \theta)$
- Finding the unknowns (parameters, latent var.) is challenging
- reversing the generative process
- finding (or maximizing) $p(\theta | x)$ or $p(\theta, z | x)$ or $p(z | x, \theta)$
- high dimensional parameter/latent spaces
- highly non-convex functions
## M1 − PCA: intuition
@svg: media/wikipedia-pca.svg 800 500
- @anim: #patch_3 | #patch_4
## M1: PCA
@svg: media/wikipedia-pca.svg 200 200 {model}
@svg: graphs/theta-x.svg 100 250 {model m11 clearright}
@svg: graphs/x-f-theta.svg 100 250 {model minv}
// @svg: media/factor.svg 40 300 {model m12}
- Principle Component Analysis (eigen-*)
- dimensionality reduction
- capture the maximum amount of data variance
- PCA probabilistic view {libyli}
- observations come from a single low-dimensional gaussian distribution
- ... and are transformed with a linear transformation (rotation + scale),
- ... and have added noise noisy
- @anim: .m11
- Over-generic graphical representation {slide}
- $\theta$ is linear transformation
- data points $x$ depend on $\theta$
- no *explicit* latent variables *{ico-pencil}*
- @anim: .minv
- Inference problem: $f$ {slide}
- dedicated algorithms (covariance matrix eigenvalues, iterative methods, …) ## M2 − Topic Modeling: matrix factorization
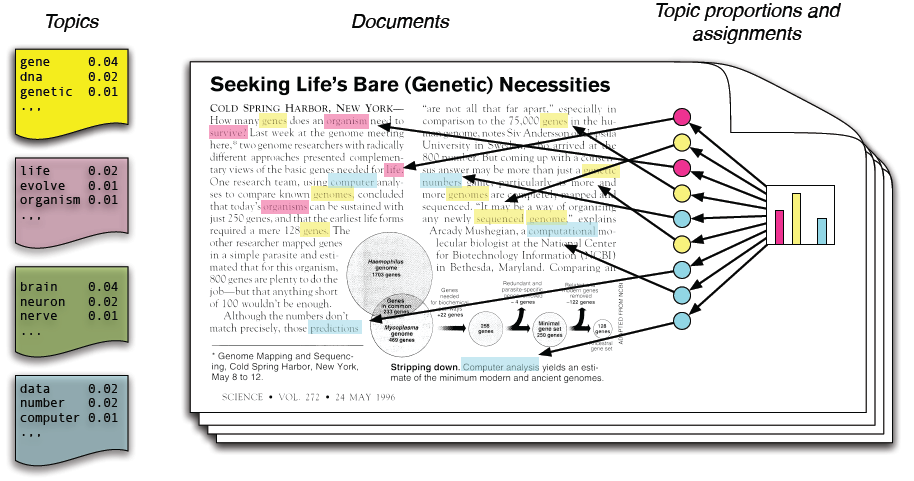 - Probabilistic Latent Semantic Analysis (PLSA)
- matrix decomposition {step2}
- non-negative {step2}
- probabilistic formulation {step2}
- $p(w|d) = \sum_z p(w|z) \times p(z|d)$ {step2}
- or $ x^i = \theta^T \cdot z^i $ (for a document $i$) {step3}
- @anim: .svg1 | #documents | #topics
- @anim: .step2 | .step3
@svg: media/matrix-decomposition.svg 700 200 {svg1}
## M2: Topic Models {libyli} // our notation in this pres is highly confusion with standards of this domain
@svg: graphs/theta-x.svg 50 200 {model m21}
@svg: graphs/thetaz-x.svg 130 200 {model m22 clearright}
@svg: graphs/x-f-thetaz.svg 130 200 {model m23}
- LDA, topic models […](file:///home/twilight/doc/PublicationsAndPresentations/2012-cpms/day-11/cpms-lecture-11-topic-models.html#slide-4)
- Latent Dirichlet Allocation
- mixture of discrete distributions (categorical/multinomial)
- Bayesian formulation of // won't go into details about bayesian
- LSA, LSI (Latent Semantic Indexing) // we don't distinguish pLSA/LDA here
- Probabilistic formulation of
- NMF (non-negative matrix factorization)
- @anim: .m21
- $x^i = \theta^T \cdot z^i$ (for a document $i$) *{ico-pencil}*
- @anim: .m22 | .m23
- Learning/Inference, $f$
- Gibbs sampling
- EM: expectation maximization
- variational inference
# @copy:#plan: %+class:highlight: .autoenc
# Auto-encoders (not yet) {autoenc}
## Feed-forward Neural Networks (supervised) {libyli}
@svg: graphs/ffnet.svg 120 400 {model}
- Supervised learning (regression, classification, …)
- the $x$ are given
- the corresponding labels $y$ are given
- Building blocks of “neural nets”
- a neuron computes a weighted sum of its inputs
- the sum is followed by an “activation” $\sigma$
- weights are learned ($W$)
- $f^o(x^i, W) = \sigma\left( \sum_d W_{o,d} \times x^i_d \right) = \sigma\left( W_{o,.} ^T \cdot x^i\right)$
- Define a network architecture (class of functions)
- number and dimension of layers
- activation functions (sigmoid, tanh, ReLU, …)
- … actually any composition of differentiable functions
- Learning with stochastic gradient descent (SGD) and variants
## M3: Autoencoders {libyli}
@svg: graphs/autoenc.svg 120 500 {model m31}
- Idea: use a feed-forward approach
- … for unsupervised learning (no labels)
- to learn a compact data representation
- Principle *{ico-pencil}*
- try to predict the input form the input
- have a latent **bottleneck**: limited model capacity
- **encoder** $f$: from the input $x$ to the latent $z$
- **decoder** $g$: from the latent $z$ to the input $x$
- @anim: .m31, .cup
- Learning principles of $f$ and $g$
- mean square reconstruction error: $\left\| g(f(x)) - x \right\|^2$
- SGD (like any neural net)
- sparsifying regularization: sparse activations ($z$, $f(x)$)
- add noise to the input (denoizing autoencoders)
- Probabilistic Latent Semantic Analysis (PLSA)
- matrix decomposition {step2}
- non-negative {step2}
- probabilistic formulation {step2}
- $p(w|d) = \sum_z p(w|z) \times p(z|d)$ {step2}
- or $ x^i = \theta^T \cdot z^i $ (for a document $i$) {step3}
- @anim: .svg1 | #documents | #topics
- @anim: .step2 | .step3
@svg: media/matrix-decomposition.svg 700 200 {svg1}
## M2: Topic Models {libyli} // our notation in this pres is highly confusion with standards of this domain
@svg: graphs/theta-x.svg 50 200 {model m21}
@svg: graphs/thetaz-x.svg 130 200 {model m22 clearright}
@svg: graphs/x-f-thetaz.svg 130 200 {model m23}
- LDA, topic models […](file:///home/twilight/doc/PublicationsAndPresentations/2012-cpms/day-11/cpms-lecture-11-topic-models.html#slide-4)
- Latent Dirichlet Allocation
- mixture of discrete distributions (categorical/multinomial)
- Bayesian formulation of // won't go into details about bayesian
- LSA, LSI (Latent Semantic Indexing) // we don't distinguish pLSA/LDA here
- Probabilistic formulation of
- NMF (non-negative matrix factorization)
- @anim: .m21
- $x^i = \theta^T \cdot z^i$ (for a document $i$) *{ico-pencil}*
- @anim: .m22 | .m23
- Learning/Inference, $f$
- Gibbs sampling
- EM: expectation maximization
- variational inference
# @copy:#plan: %+class:highlight: .autoenc
# Auto-encoders (not yet) {autoenc}
## Feed-forward Neural Networks (supervised) {libyli}
@svg: graphs/ffnet.svg 120 400 {model}
- Supervised learning (regression, classification, …)
- the $x$ are given
- the corresponding labels $y$ are given
- Building blocks of “neural nets”
- a neuron computes a weighted sum of its inputs
- the sum is followed by an “activation” $\sigma$
- weights are learned ($W$)
- $f^o(x^i, W) = \sigma\left( \sum_d W_{o,d} \times x^i_d \right) = \sigma\left( W_{o,.} ^T \cdot x^i\right)$
- Define a network architecture (class of functions)
- number and dimension of layers
- activation functions (sigmoid, tanh, ReLU, …)
- … actually any composition of differentiable functions
- Learning with stochastic gradient descent (SGD) and variants
## M3: Autoencoders {libyli}
@svg: graphs/autoenc.svg 120 500 {model m31}
- Idea: use a feed-forward approach
- … for unsupervised learning (no labels)
- to learn a compact data representation
- Principle *{ico-pencil}*
- try to predict the input form the input
- have a latent **bottleneck**: limited model capacity
- **encoder** $f$: from the input $x$ to the latent $z$
- **decoder** $g$: from the latent $z$ to the input $x$
- @anim: .m31, .cup
- Learning principles of $f$ and $g$
- mean square reconstruction error: $\left\| g(f(x)) - x \right\|^2$
- SGD (like any neural net)
- sparsifying regularization: sparse activations ($z$, $f(x)$)
- add noise to the input (denoizing autoencoders)
 n. RBM ? {notes}
n. VAE ? {notes}
# @copy:#plan: %+class:highlight: .gan
# Generative Adversarial Networks {#gan}
## Adversarial Examples (Goodfellow, 2014) {libyli} // ostrich
n. RBM ? {notes}
n. VAE ? {notes}
# @copy:#plan: %+class:highlight: .gan
# Generative Adversarial Networks {#gan}
## Adversarial Examples (Goodfellow, 2014) {libyli} // ostrich
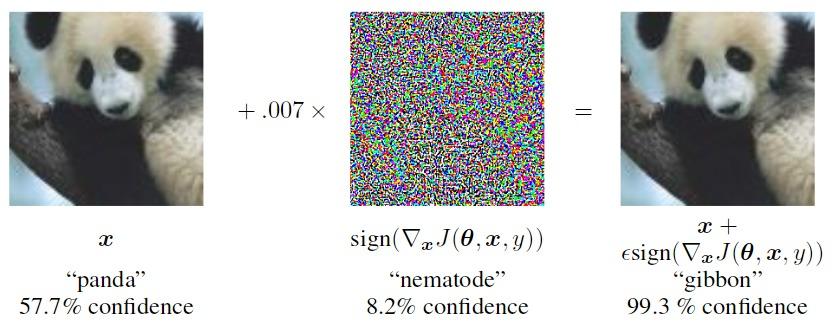 - @anim: %attr:.hasFS:height:200
- In high dimensional spaces
- a huge part of the input space is never seen / irrelevant
- models are easy to fool
- models are wrongly calibrated (bad confidence estimation)
- Goal
- build machine learning methods robust to adversarial examples
- (relation to anomaly detection)
- Idea of adversarial training
- generate adversarial examples automatically
- train also using these examples
## GAN Intuition {infobox image-full top-left darkened /black-bg /no-status}
- Ongoing struggle between two players:
- one that makes fake samples,
- one that tries to detect them.
## M4: Generative Adversarial Networks {libyli}
@svg: graphs/ganright.svg 90 500 {model heightauto}
@svg: graphs/ganleft.svg 90 482 {model heightauto alignbottom}
- Principle: train two networks
- $G$: to generate samples from noise
- $D$: to discriminate between true and generated samples
- NB: $G$ will try to fool $D$
- Elements *{ico-pencil}*
- $x$: a training sample (real)
- $z$: a random point in a latent space
- $\tilde{x}{}$: a generated sample (fake)
- $y$: a binary “fake” ($0$) or “real” ($1$) value
- GAN is a minimax game
- $\min_G \max_D V(D, G)$
- $V(D, G) = \; \mathbb{E}_{x} [log( D(x) ) ] + \mathbb{E}_z [log(1 - D(G(z))) ]$
## GAN Target {libyli}
@svg: graphs/ganright.svg 90 500 {model heightauto}
- GAN optimization is a minimax
- $\min_G \max_D V(D, G)$
- $V(D, G) = \; \mathbb{E}_{x} [log( D(x) ) ] + \mathbb{E}_z [log(1 - D(G(z))) ]$
- find a $G$ that minimizes the accuracy of the **best** $D$
- Equilibrium and best strategies
- $D$ ideally computes $D(x) = \frac{p_{data}(x)}{p_{data}(x) + p_{gen}(x)}$
- thus $G$ should ideally fit $p_{data}(x)$
- … $G$ samples for $p_{data}(x)$
- Optimization in practice
- alternate optimization of $G$ and $D$
- warning: $\min \max$ is not $\max \min$
- saddle point finding (hot topic)
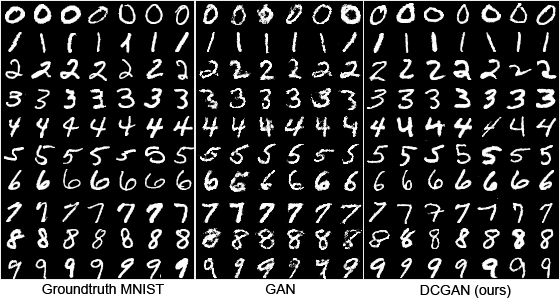
## Example of GAN-generated Digits
- DCGAN, Radford et al., 2015/2016
- @anim: %attr:.hasFS:height:200
- In high dimensional spaces
- a huge part of the input space is never seen / irrelevant
- models are easy to fool
- models are wrongly calibrated (bad confidence estimation)
- Goal
- build machine learning methods robust to adversarial examples
- (relation to anomaly detection)
- Idea of adversarial training
- generate adversarial examples automatically
- train also using these examples
## GAN Intuition {infobox image-full top-left darkened /black-bg /no-status}
- Ongoing struggle between two players:
- one that makes fake samples,
- one that tries to detect them.
## M4: Generative Adversarial Networks {libyli}
@svg: graphs/ganright.svg 90 500 {model heightauto}
@svg: graphs/ganleft.svg 90 482 {model heightauto alignbottom}
- Principle: train two networks
- $G$: to generate samples from noise
- $D$: to discriminate between true and generated samples
- NB: $G$ will try to fool $D$
- Elements *{ico-pencil}*
- $x$: a training sample (real)
- $z$: a random point in a latent space
- $\tilde{x}{}$: a generated sample (fake)
- $y$: a binary “fake” ($0$) or “real” ($1$) value
- GAN is a minimax game
- $\min_G \max_D V(D, G)$
- $V(D, G) = \; \mathbb{E}_{x} [log( D(x) ) ] + \mathbb{E}_z [log(1 - D(G(z))) ]$
## GAN Target {libyli}
@svg: graphs/ganright.svg 90 500 {model heightauto}
- GAN optimization is a minimax
- $\min_G \max_D V(D, G)$
- $V(D, G) = \; \mathbb{E}_{x} [log( D(x) ) ] + \mathbb{E}_z [log(1 - D(G(z))) ]$
- find a $G$ that minimizes the accuracy of the **best** $D$
- Equilibrium and best strategies
- $D$ ideally computes $D(x) = \frac{p_{data}(x)}{p_{data}(x) + p_{gen}(x)}$
- thus $G$ should ideally fit $p_{data}(x)$
- … $G$ samples for $p_{data}(x)$
- Optimization in practice
- alternate optimization of $G$ and $D$
- warning: $\min \max$ is not $\max \min$
- saddle point finding (hot topic)
## Example of GAN-generated Digits
- DCGAN, Radford et al., 2015/2016
 ## Example of GAN-generated Images
@svg: media/dcgan-faces.svg 800 500
@anim: div.hasSVG | %viewbox:#zzz | %viewbox:#zzz2
# @copy:#plan: %+class:highlight: .focuses, .focus.optim
## How is all This Optimized {libyli}
- Probabilistic models *{ico-pencil}*
- Gibbs sampling
- Expectation Maximization
- Variational Inference
- Black-box variational inference (e.g., [Edward](https://github.com/blei-lab/edward))
- Deep models (composition of differentiable function)
- … using “back-propagation” (chain rule)
- (S)GD
- SGD with momentum
- SGD with adaptation: RMSProp, ADAM, …
- batch normalization trick
- link: other tricks for [learning GANs](https://github.com/soumith/ganhacks)
- are local minima any good?
- link: [which optimizer?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
## An overview of gradient descent optimization algorithms {no-print}
## Example of GAN-generated Images
@svg: media/dcgan-faces.svg 800 500
@anim: div.hasSVG | %viewbox:#zzz | %viewbox:#zzz2
# @copy:#plan: %+class:highlight: .focuses, .focus.optim
## How is all This Optimized {libyli}
- Probabilistic models *{ico-pencil}*
- Gibbs sampling
- Expectation Maximization
- Variational Inference
- Black-box variational inference (e.g., [Edward](https://github.com/blei-lab/edward))
- Deep models (composition of differentiable function)
- … using “back-propagation” (chain rule)
- (S)GD
- SGD with momentum
- SGD with adaptation: RMSProp, ADAM, …
- batch normalization trick
- link: other tricks for [learning GANs](https://github.com/soumith/ganhacks)
- are local minima any good?
- link: [which optimizer?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
## An overview of gradient descent optimization algorithms {no-print}
 [which optimizer to use?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
## An overview of gradient descent optimization algorithms {no-print}
[which optimizer to use?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
## An overview of gradient descent optimization algorithms {no-print}
 [which optimizer to use?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
# @copy:#plan: %+class:highlight: .focuses, .focus.conv
## Convolution Models
- Extensions of topic models
- replace topic with motifs (with temporal structure)
- PLSM, HDLSM (Emonet et al., 2014)
- Convolutional Neural Networks
- most of Christian's talk (ConvNets)
- pixelRNN, …
# @copy:#plan: %+class:highlight: .focuses, .focus.depth
## Depth in Unsupervised Learning {libyli}
- Neural Network depth = Hierarchical probabilistic models
- Neural Networks
- “deep learning”
- adding layers
- handling depth with ReLU
- handling depth with “ResNets”, Residual Networks (Deep residual learning for image recognition, He et al. 2015)
- Hierarchical probabilistic models
- Topic Models (LDA, Blei, Ng, Jordan, 2003)
- Deep exponential families (Ranganath et al., 2015) *{ico-pencil}* // blei AISTATS
- Deep Gaussian Processes (Damianou, Lawrence, 2013) // AISTATS
# @copy:#plan: %+class:highlight: .focuses, .focus.width
## Width in Unsupervised Learning {libyli}
- Width
- Topic model: number of topics
- Autoencoder: number of neurons in the hidden layer
- GAN: size of $z$
- Non-parametric approaches, HDP, HDLSM (Emonet et al., 2014)
- Gaussian process as an infinitely wide NN layer (Damianou, Lawrence, 2013)
- universal function approximator
- Autoencoders with group sparsity (Bascol et al., 2016)
- allow for many hidden units
- penalize the use of too many of them
# @copy:#plan: %+class:highlight: .focuses, .focus.semantics
## Semantics in Unsupervised Learning {libyli}
- Probabilistic models
- inference is difficult
- consider the “explains away” principle
- lead to better interpretability (meaningful $z$) // rain, sun allergy, umbrella
- Simpler feed-forward model
- independent processing
- inhibitory feedback is difficult
- Bascol et al, 2016 …
- group-sparsity on filters
- local activation inhibition
- global activation entropy maximization
- AdaReLU: activation function that zeroes low-energy points
# @copy:#plan: %+class:highlight: .focuses, .focus.temporal
## Sequential and Temporal Modeling
- cf. Christian Wolf's talk
- HMM, CRF =?= RNN
- LSTM =?= HSMM
*{ico-hugepencil}*
# @copy:#plan: %+class:highlight: .focuses, .focus.recentgans
# Recent GAN Works {#recentgans}
## M5: BiGAN, ALI (2016)
@svg: graphs/biganright.svg 200 500 {model}
@svg: graphs/biganleft.svg 200 500 {model}
*{ico-hugepencil}*
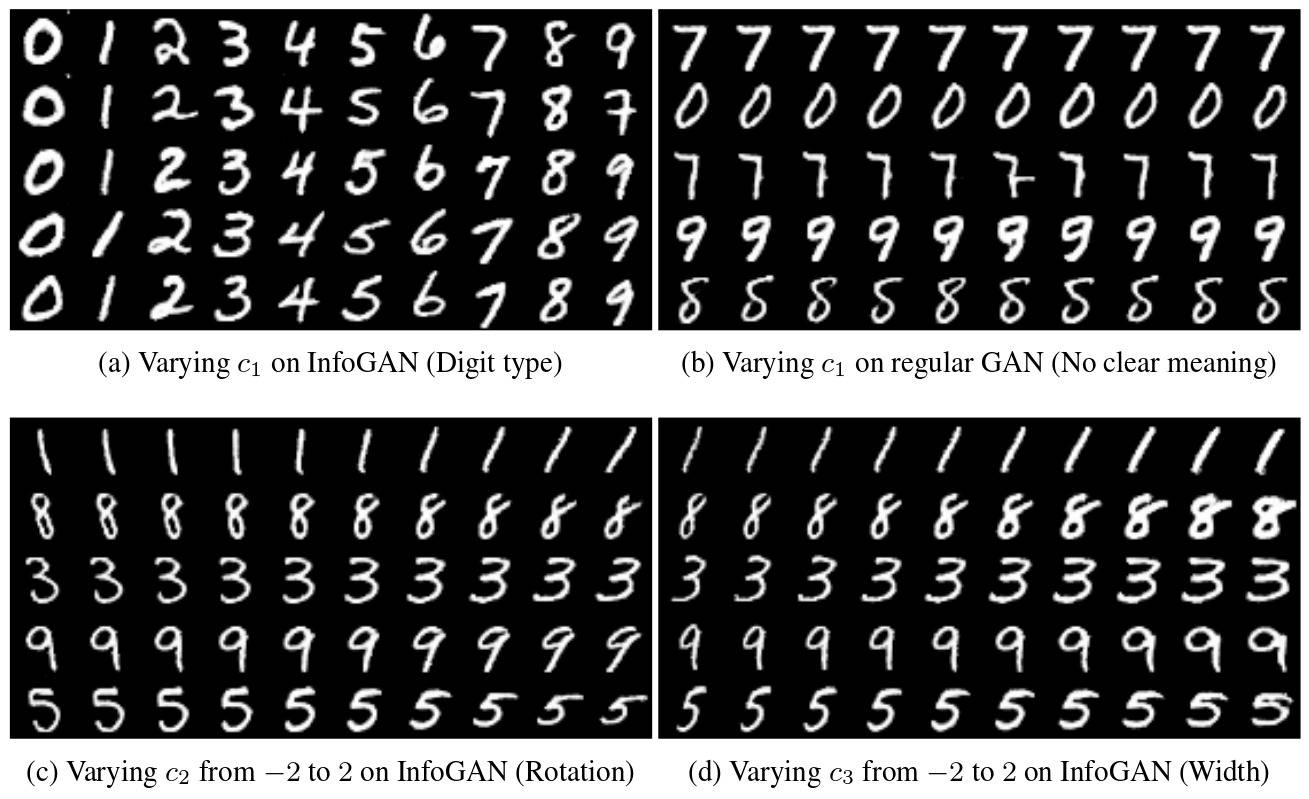
## M6: InfoGAN (2016) {libyli}
@svg: graphs/infoganright.svg 250 480 {model}
// @svg: graphs/ganleft.svg 93 480 {model heightauto alignbottom}
- GAN noise ($z$)
- is unstructured
- can be partly ignored by $G$
- InfoGAN idea and principle
- part of the noise is a code $c$
- enforce high mutual information
[which optimizer to use?](http://sebastianruder.com/optimizing-gradient-descent/index.html#whichoptimizertouse)
# @copy:#plan: %+class:highlight: .focuses, .focus.conv
## Convolution Models
- Extensions of topic models
- replace topic with motifs (with temporal structure)
- PLSM, HDLSM (Emonet et al., 2014)
- Convolutional Neural Networks
- most of Christian's talk (ConvNets)
- pixelRNN, …
# @copy:#plan: %+class:highlight: .focuses, .focus.depth
## Depth in Unsupervised Learning {libyli}
- Neural Network depth = Hierarchical probabilistic models
- Neural Networks
- “deep learning”
- adding layers
- handling depth with ReLU
- handling depth with “ResNets”, Residual Networks (Deep residual learning for image recognition, He et al. 2015)
- Hierarchical probabilistic models
- Topic Models (LDA, Blei, Ng, Jordan, 2003)
- Deep exponential families (Ranganath et al., 2015) *{ico-pencil}* // blei AISTATS
- Deep Gaussian Processes (Damianou, Lawrence, 2013) // AISTATS
# @copy:#plan: %+class:highlight: .focuses, .focus.width
## Width in Unsupervised Learning {libyli}
- Width
- Topic model: number of topics
- Autoencoder: number of neurons in the hidden layer
- GAN: size of $z$
- Non-parametric approaches, HDP, HDLSM (Emonet et al., 2014)
- Gaussian process as an infinitely wide NN layer (Damianou, Lawrence, 2013)
- universal function approximator
- Autoencoders with group sparsity (Bascol et al., 2016)
- allow for many hidden units
- penalize the use of too many of them
# @copy:#plan: %+class:highlight: .focuses, .focus.semantics
## Semantics in Unsupervised Learning {libyli}
- Probabilistic models
- inference is difficult
- consider the “explains away” principle
- lead to better interpretability (meaningful $z$) // rain, sun allergy, umbrella
- Simpler feed-forward model
- independent processing
- inhibitory feedback is difficult
- Bascol et al, 2016 …
- group-sparsity on filters
- local activation inhibition
- global activation entropy maximization
- AdaReLU: activation function that zeroes low-energy points
# @copy:#plan: %+class:highlight: .focuses, .focus.temporal
## Sequential and Temporal Modeling
- cf. Christian Wolf's talk
- HMM, CRF =?= RNN
- LSTM =?= HSMM
*{ico-hugepencil}*
# @copy:#plan: %+class:highlight: .focuses, .focus.recentgans
# Recent GAN Works {#recentgans}
## M5: BiGAN, ALI (2016)
@svg: graphs/biganright.svg 200 500 {model}
@svg: graphs/biganleft.svg 200 500 {model}
*{ico-hugepencil}*
## M6: InfoGAN (2016) {libyli}
@svg: graphs/infoganright.svg 250 480 {model}
// @svg: graphs/ganleft.svg 93 480 {model heightauto alignbottom}
- GAN noise ($z$)
- is unstructured
- can be partly ignored by $G$
- InfoGAN idea and principle
- part of the noise is a code $c$
- enforce high mutual information between $c$ and $\tilde{x}{}$ - in practice, predict $c$ from $\tilde{x}{}$ - use a coder $Q$ - @anim: .model - Structure in the code *{ico-pencil}* - Cartesian product of anything - (categorical, continuous, ...) - $\min_{G,Q} \max_D V_{InfoGAN}(D, G, Q) = V_{InfoGAN}(D, G) - \lambda L_I(G, Q) $ {denser} ## InfoGAN: some results
 ## *GAN as a Modeling Tool {libyli}
- Conditional GANs and variants (2016)
- the GAN process is conditioned on some data
- e.g., image generation condition on a semantic mask
- e.g., image conditioned on a text sentence
- e.g., audio conditioned on a text sentence
- e.g., image conditioned on class and keypoints
- …
- Very complex (and operational) setups
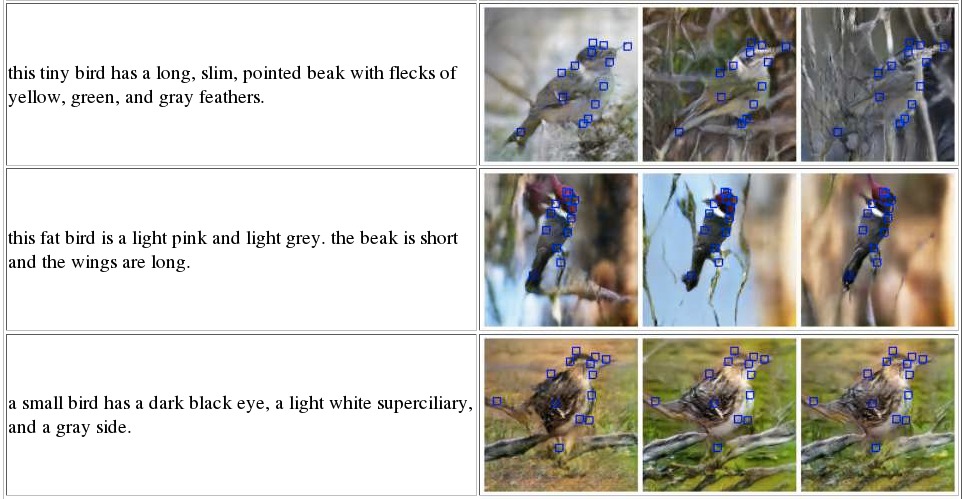
## Ex: Learning What and Where to Draw
## *GAN as a Modeling Tool {libyli}
- Conditional GANs and variants (2016)
- the GAN process is conditioned on some data
- e.g., image generation condition on a semantic mask
- e.g., image conditioned on a text sentence
- e.g., audio conditioned on a text sentence
- e.g., image conditioned on class and keypoints
- …
- Very complex (and operational) setups
## Ex: Learning What and Where to Draw
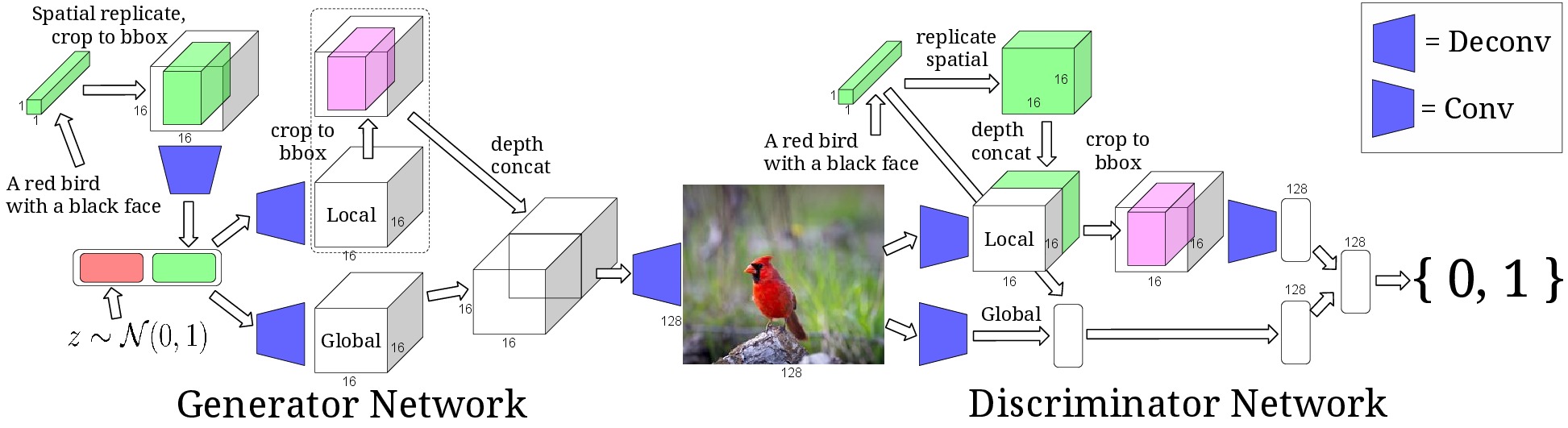
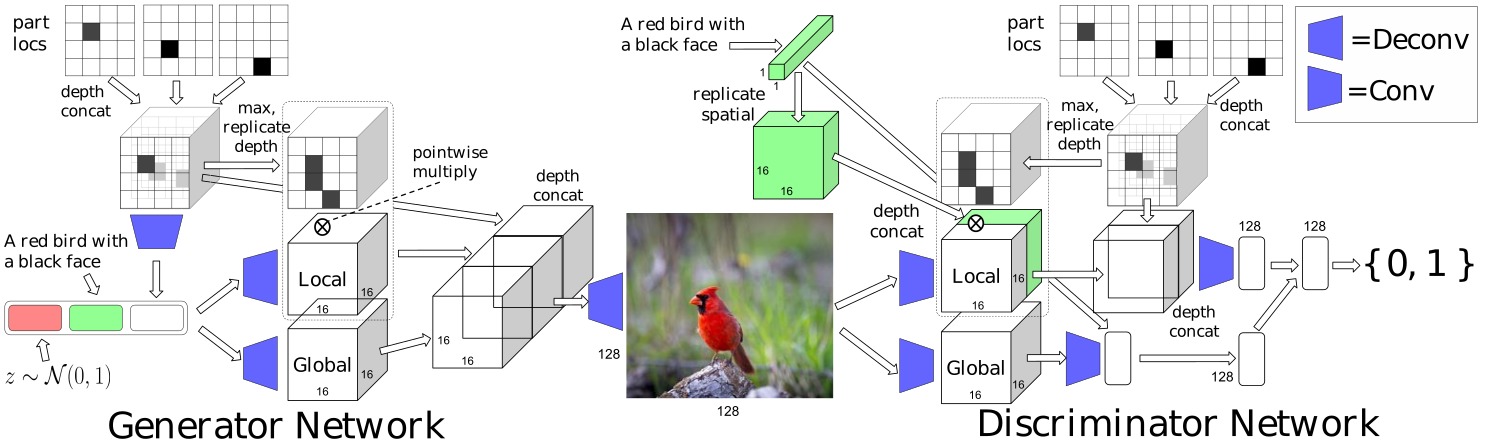 ## Ex: Learning What and Where to Draw
- Scott Reed et al.
## Ex: Learning What and Where to Draw
- Scott Reed et al.
 # @copy:#plan: %+class:highlight: .conclusion
## Take-home Message {infobox takehome image-fit top-left darkened /black-bg /no-status /fancy-slide}
- Return of the generative approaches.
- Two ways of estimating densities
- generative models,
- generative networks.
- The golden age of Variational Inference. // (and black-box VI)
- The golden age of SGD. // is the Gibbs sampling of continuous spaces
- Saddle points! // active and will progress a lot
## Thank You!
# @copy:#plan: %+class:highlight: .conclusion
## Take-home Message {infobox takehome image-fit top-left darkened /black-bg /no-status /fancy-slide}
- Return of the generative approaches.
- Two ways of estimating densities
- generative models,
- generative networks.
- The golden age of Variational Inference. // (and black-box VI)
- The golden age of SGD. // is the Gibbs sampling of continuous spaces
- Saddle points! // active and will progress a lot
## Thank You!Questions? {infobox image-fit top-left darkened /black-bg /fancy-slide deck-status-fake-end nocurien} - - - - twitter − [@remiemonet](https://twitter.com/remiemonet) - twitter − [@DataIntelGroup](https://twitter.com/DataIntelGroup)
# Attributions
## sayumiQ {image-full bottom-left darkened /black-bg /no-status}
## seefit {image-full bottom-left darkened /black-bg /no-status}
## govan riverside {image-fit bottom-left darkened /black-bg /no-status}
## GorissenM {image-full bottom-left darkened /black-bg /no-status}
## someToast {image-fit bottom-left darkened /black-bg /no-status}
## ShutterRunner {image-full bottom-left darkened /black-bg /no-status}
## END {no-print}
/ − − will be replaced by the title
